

Módulo GNSS Quectel
O LC79D da QUECTEL é um receptor GNSS multi-constelação de forma ultra pequeno, é ideal para projetos com espaço limitado, como veículos eMobility.
O Sistema Global de Navegação por Satélite (GNSS) fornece uma maneira bem compreendida, amplamente implantada e aceita para determinar com precisão a localização. Portanto, ele sustenta a navegação, o rastreamento de bens e ativos e, com bilhões de dispositivos GNSS já implantados, tornou-se padrão.
No entanto, as aplicações GNSS não são únicas, e as empresas têm o desafio de encontrar e implantar soluções adequadas que atendam às restrições de suas aplicações.
No eMobility, representado por patinetes elétricos e bicicletas (eScooters e eBikes), os provedores devem equilibrar cuidadosamente a precisão, o custo, o consumo de energia e o tamanho de um módulo GNSS para selecionar a melhor opção.

Desafios GNSS em eMobility
Todos os serviços são bem-sucedidos ou fracassam com base na experiência do cliente e isso começa desde a primeira interação.
Desta forma, o primeiro desafio do eMobility é tornar o veículo fácil de encontrar. O tamanho das eBikes e eScooters, por serem menores, dificulta ainda mais a capacidade dos usuários de realmente localizar a bicicleta. Eles podem ser facilmente escondidos entre carros estacionados, atrás de árvores ou obstruídos por móveis urbanos.
O desafio de localizar dispositivos também afeta os provedores de serviços, que não conseguem encontrar seus veículos para mantê-los, recarregar baterias e realocar para áreas de maior demanda. Isso custa aos provedores de serviços tempo perdido do trabalhador e aumenta o tempo de inatividade de seus veículos.
A regulamentação é o próximo grande obstáculo. A adoção de eScooters e eBikes está crescendo rapidamente e isso está causando preocupação para as autoridades municipais que procuram restringir o uso nas calçadas.
A restrição é um desafio significativo para a eMobility por causa da demarcação muito limitada entre estradas e calçadas.
Os fornecedores do eScooter enfrentam o desafio de como lidar com isso.
Embora tenham a capacidade de soar alarmes ou até mesmo desligar o motor e travar o veículo, os alarmes falsos terão um impacto negativo na experiência do usuário.
A precisão é, portanto, vital, pois a restrição na calçada provavelmente se tornará um requisito regulamentar. O papel do GNSS ampliado por tecnologias de posicionamento adicionais se tornará cada vez mais importante.
Quanto mais satélites um eScooter puder ver, melhor será o desempenho da solução GNSS.O acesso a um bom sinal GNSS de várias constelações de satélites, além do aumento da contagem de canais, é fundamental. Talvez o maior desafio seja a natureza desses veículos.
Eles são conduzidos em todos os tipos de condições hostis: perto de edifícios e sob pontes; e a antena GNSS é muito pequena e o corpo humano pode atrapalhar.
A vibração também afetará negativamente o desempenho do GNSS em uma scooter típica. Estima-se que um eScooter ou eBike só pode se conectar a 50-60% dos satélites aos quais um carro no mesmo local poderia se conectar.
A solução para eMobility
Em condições perfeitas, quando o céu está claro e não há obstruções no caminho, o GNSS pode dizer aos usuários exatamente onde está um eScooter.
No entanto, raramente existem condições perfeitas e os veículos de micromobilidade contam com métodos adicionais para aumentar o desempenho do GNSS.
O Dead Reckoning (DR) resolve muitos dos problemas combinando a velocidade da roda e os dados da unidade de medição inercial (IMU) – geralmente acelerômetro e informações giroscópicas – com GNSS.
A precisão da posição pode ser afetada por questões como: mudanças na pressão dos pneus, vibração da estrada e diferenças atmosféricas que podem afetar o desempenho do motor de Dead Reckoning quando o GNSS é desafiado.
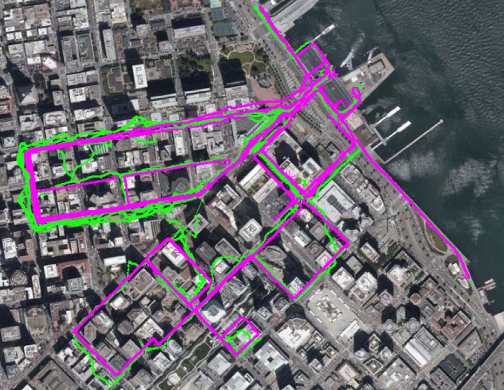
No eMobility, o Dead Reckoning é ideal e fornece grandes melhorias para o posicionamento em grandes centros urbanos, como aqueles no distrito financeiro de San Francisco/EUA.
Nos dados do drive test na Figura abaixo, você pode ver claramente ( em verde) a melhoria em relação ao standalone GNSS L1 + L5 e (em roxo) de GNSS L1 + L5 com DR, que está oferecendo uma melhoria de 10x na precisão de localização.

O LC79D é um receptor GNSS multi-constelação de banda dupla L1 / L5 que oferece um fator de forma ultra pequeno com dimensões de 10,1 mm × 9,7 mm × 2,4 mm, tornando-o ideal para projetos com espaço limitado, como veículos eMobility. O melhor preço, desempenho e baixo consumo de energia do LC79D o torna uma solução perfeita e única.
Ele pode rastrear bandas L1 e L5 para sistemas de satélite, incluindo GPS, Galileo e QZSS.
Na banda L1, o LC79D pode rastrear os sistemas de satélite GLONASS e Beidou e o módulo rastreia o sistema IRNSS na banda L5.
Fornecer capacidade L1 / L5 oferece grande diversidade e escolha de conexão, mesmo nos locais mais hostis.
Em contraste com os módulos GNSS somente L1, o LC79D adiciona a banda L5, o que aumenta muito o número de satélites disponíveis, melhora a precisão da posição e ajuda a mitigação de desafios de múltiplos caminhos.
O módulo LC79D GNSS da Quectel com o software de Dead Reckoning funciona incrivelmente bem, sendo possível rastrear por 10-15 minutos através de caminhos GNSS muito difíceis através de cidades e manter uma precisão de menos de 10 metros.
Mais valioso para os provedores de eMobility, o chipset GNSS, baseado na tecnologia de processo de 28 nm, é acoplado a uma solução avançada de gerenciamento de baixo consumo de energia que permite operação low-power e determinação de posicionamento.
Isso torna o módulo adequado para os sistemas sensíveis à energia e alimentados por bateria usados no eMobility.
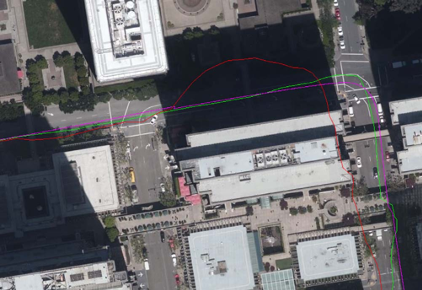
A Figura abaixo compara o desempenho de rastreamento com L1 apenas em vermelho, L1 e L5 em verde e L1 e L5 mais o DR em roxo para que você possa ver as vantagens.
Conclusão
O LC79D permite que a indústria de eMobility, especialmente aqueles envolvidos na micromobilidade, aproveitem a fusão de dados de diferentes sensores em um espaço muito pequeno a um custo incremental muito baixo com precisão incomparável.
O LC79D está em produção e as amostras e kits de desenvolvimento estão disponíveis. Eles oferecem capacidade L1 e L5 e fazem a ponte entre os módulos GPS básicos e os sistemas GNSS de ponta, sendo uma ótima opção para uso em eMobility.


