O uso de protocolos de comunicação industrial é uma realidade. Para este fim existem muitos tipos de protocolos, como EtherCAT, Mechatrolink III, Powerlink, Profinet, EtherNet/IP. Cada um com suas características e especificações. O EtherCAT é utilizado principalmente para controle industrial.
A palavra EtherCAT vêm de Ethernet for Control Automation Technology, ou seja, é a tecnologia/protocolo Ethernet para automação de controle. Como o próprio nome diz, EtherCAT tem como base a Ethernet, oferecendo uma gama de vantagens importantes para a automação industrial, entre elas, a velocidade de comunicação e fácil integração ä rede corporativa da indústria.
A quantidade de dados que trafega em redes industriais cresce diariamente, assim como, a complexidade delas.
Algumas características da EtherCAT são:
– Proporcionar a troca de informações entre sistemas de gerenciamento e supervisão;
– Armazenar informações em bancos de dados;
– Oferecer fácil integração às máquinas presentes em redes corporativas, como: impressoras, servidores, entre outros;
Características que são imprescindíveis para a comunicação entre máquinas industriais e corporativas.
Como visto, a rede EtherCAT atende esta demanda, trocando informações em uma linguagem comum entre os dois ambientes e facilitando o processo de interface.
Algumas vantagens da Rede EtherCAT:
- • Tamanho de rede ilimitado: a rede EtherCAT pode ter o tamanho da sua aplicação e possibilita fácil expansão da mesma;
- • Aproximação das redes corporativa e industrial no chão de fábrica, facilitando a interface entre elas;
- • Velocidade otimizada: a EtherCAT otimiza os pacotes de dados que trafegam na rede, atendendo a severidade de troca de dados de um ambiente industrial;
A Macnica DHW, através da Macnica CYTECH, oferece soluções master e slave para aplicação EtherCAT saiba mais:
A Macnica CYTECH, fica na China, em Hong Kong e possui mais de 500 funcionários. A CYTECH possui um grupo forte de desenvolvimento que utiliza as melhores tecnologias dispostas no mercado.
A Macnica DHW tem acesso a tudo o que é desenvolvido por este time e pelos demais do Grupo Macnica Inc.,.
As soluções do Grupo Macnica assinam como: MPRESSION.
Chip EtherCAT Master ASSP
O chip EtherCAT Master ASSP utiliza o protocolo padrão EtherCAT master. Adota interface de barramento paralelo genérico para conectar qualquer CPU e controlar o chip. Suporta processadores ARM ou plataforma de processamento x86.
A Macnica Cytech pode fornecer o código de referência do software, a função da API e o software para o sistema de inicialização de documentos XML, etc. Essa solução poderia ser aplicada para controlar os motores EtherCAT padrão e os equipamentos de I/O.
A Macnica Cytech implementa a camada de protocolo do EtherCAT pela lógica FPGA através da pré-programação que poderá ser usado no seu projeto como um chip dedicado. A figura abaixo ilustra a aplicação.

Características:
⦁ Suporta a programação bare-metal para o master EtherCAT no processador ARM; nenhum sistema operacional é necessário;
⦁ Suporta processador x86 e conector PCIe; código de referência do driver e aplicativo Linux (com o kernel em tempo real Xenomai) é fornecido;
⦁ Janela de depuração do sistema fácil de usar;
⦁ Pequena carga na CPU; comunicação master em tempo real EtherCAT pode ser rapidamente alcançada;
⦁ Forte sincronização entre master e slave; o jitter do tempo de sincronização é menor que 1us;
⦁ Ciclo curto; um ciclo de comunicação de 31.25us poderia ser alcançado facilmente;
⦁ Várias estações escravas podem ser conectadas e configuradas através do sistema de configuração de documentos XML;
EtherCAT Slave + FOC
O produto é desenvolvido para aplicações industriais que exigem custo-benefício, flexibilidade de projeto, conectividade e desempenho em tempo real. As aplicações alvo incluem automação de fábrica, controle de motor industrial, módulo I/O e equipamento robótico.
A solução “EtherCAT slave + FOC”, com a implementação do slave EtherCAT em uma base do XMC4300, e a implementação do controle de loop de corrente do servo motor FOC pela aplicação Intel PSG MAX10 é mostrada abaixo.
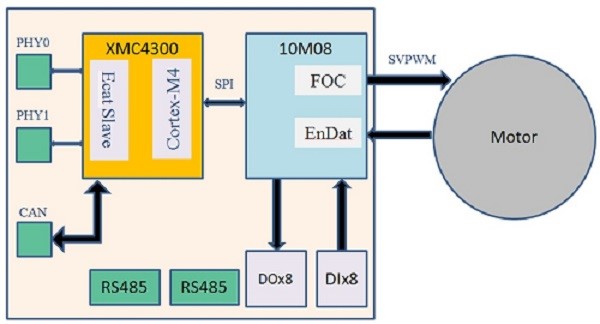
A solução “EtherCAT slave + FOC” é utilizada em máquinas CNC ao redor do mundo.
Consulte a Macnica DHW para desenvolver o módulo slave de acordo com a sua necessidade.
Quer saber como a rede EtherCAT funciona?
O EtherCAT master envia uma mensagem que passa por cada nó. Cada dispositivo EtherCAT slave lê os dados endereçados a ele e responde a medida que o frame está se movendo. O último nó em um segmento detecta uma porta aberta e envia a mensagem de volta ao master, usando o recurso duplex da tecnologia. O delay do frame é calculado pelo delay de propagação do hardware.
O EtherCAT master é o único nó de um segmento autorizado a enviar ativamente um frame EtherCAT, todos os demais apenas encaminham frames de resposta. Isto evita atrasos imprevisíveis e garante atuação em tempo real.
O EtherCAT master usa um controlador de acesso Ethernet padrão (MAC) sem um processador de comunicação adicional, isso permite que ele seja implementado em qualquer plataforma de hardware com uma porta Ethernet disponível, independente do sistema operacional ou software aplicativo em tempo real que está sendo utilizado.
Saiba mais sobre as soluções EtherCAT nos links abaixo: